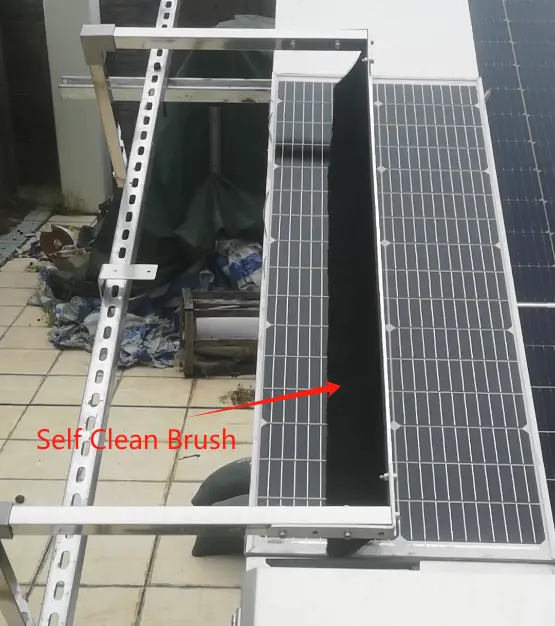
레일 태양광 패널 청소 로봇 는 태양광 어레이에 설치된 고정 트랙에서 작동하도록 설계된 특수 자동 청소 장치입니다. 미리 놓인 가이드 레일을 따라 이동하여 대형 다열 태양광 모듈을 효율적으로 전체 범위에서 청소할 수 있습니다. 비트랙형 또는 휴대용 장치에 비해 작동 경로가 정밀하고 자동화 수준이 높기 때문에 대형 지상 발전소나 복잡한 옥상 배치에 특히 적합합니다.

태양광 패널용 레일 청소 로봇의 장점 및 작동 원리
핵심 장점은 다음과 같습니다. 높은 신뢰성 그리고 완전 자동화된 커버리지. 트랙 시스템은 로봇에 정밀한 탐색 기능을 제공하여 청소 브러시 또는 청소 장치가 태양 전지판 표면에 밀착하여 먼지, 모래, 새 배설물 및 기타 오염 물질을 효과적으로 제거하도록 합니다. 한 연구에 따르면 청소된 태양광 패널의 변환 효율은 12.16%에서 13.72%로 증가할 수 있다고 합니다.
이 유형의 로봇은 일반적으로 건식 브러시, 습식 브러시 또는 진공 흡입을 청소 방법으로 사용합니다. 핵심 설계 요소는 가이드 레일 시스템; Zhixin Hang BWC 롤러 트랙과 같은 부품은 방진, 자가 세척, 고온 및 저온 내구성(-70°C ~ +260°C), 생활 방수 특성을 갖추고 있어 태양광 발전소의 열악한 실외 환경을 견딜 수 있습니다. 일부 레일 디자인은 특수 설계된 트랙과 짝을 이루는 V-슬롯 또는 R-슬롯이 있는 롤러를 사용하여 장거리(최대 500미터) 작동이 원활하게 이루어지도록 합니다.
기술 표준 및 주요 성과
중국은 이러한 제품을 규제하기 위해 다음과 같은 관련 그룹 표준을 시행하고 있습니다. T/ZZB 2602-2021 태양광 모듈용 트랙 기반 지능형 청소 로봇 및 태양광 모듈 청소 로봇의 T/JSREA 3003-2024 운영 사양. 이러한 표준은 핵심 성과 지표를 명확하게 정의합니다:
- 운영 속도: 청소 작동 속도는 분당 6미터를 초과해야 합니다.
- 배터리 수명: 완전히 충전된 상태에서는 3시간 이상 연속 작업할 수 있어야 합니다.
- 청소 효과: 30° 각도에서의 먼지 제거율은 90% 이상이어야 합니다.
- 환경 적응성: 일반적으로 작업 환경 온도는 -20°C~60°C(영하의 조건에서 사용하기 위한 것이 아님) 사이여야 하며 고도 5000미터 이하의 지역에 적합해야 합니다.
- 안전 요구 사항: 다음을 포함해야 합니다. 추락 방지. 고급 설계는 로봇의 전면과 후면에 여러 개의 고감도 센서를 구현하여 360° 사각지대 없는 모니터링을 실현합니다. 패널의 가장자리가 감지되면 제동 및 후진 후퇴 프로그램이 즉시 활성화됩니다. 또한 과전류 보호 및 제한 보호와 같은 안전 기능도 포함되어 있습니다.

토도 자동 태양열 청소 시스템
청소 거리: 1600~3000m;
배터리: 24V/16Ah;
패널 전력: 55W;
브러시: 비먼지성 유연 소재 PA610;
장애물 통과 각도:≤22°;
환경 온도:(-30℃~70℃);
보호 수준: IP65;
보행 속도: 12m/분
세척 모드: 드라이 클리닝
제어 모드: 인터넷 원격 제어 + 앱 제어 + 수동 제어.
시장 전망 및 추진 요인
트랙 기반 청소 로봇 시장은 빠르게 성장하고 있습니다. 한 시장 조사 보고서에 따르면 2031년까지 트랙 기반 태양광 패널 청소 로봇의 글로벌 시장 가치는 2025년부터 2031년까지 연평균 17.61%씩 성장하여 1조 4,519억 달러에 달할 것으로 예상됩니다. 이러한 원동력은 주로 전 세계 태양광 설치 용량의 지속적인 증가와 발전소 소유주들의 다음과 같은 긴급한 수요에서 비롯됩니다. 발전 효율 개선 및 운영 비용 절감. 먼지가 쌓이면 연평균 6% 이상의 발전 효율이 감소할 수 있으므로 정기적인 청소는 선택이 아닌 필수입니다.
디자인 과제 및 솔루션
분명한 장점에도 불구하고 설계상의 문제도 고려해야 합니다. 연구에 따르면 압력 및 진동 로봇 작동 중에 발생하는 열은 태양광 패널과 그 장착 구조에 부정적인 영향을 미쳐 장기적으로 부품 수명에 영향을 미칠 수 있습니다. 이 문제를 해결하기 위해 일부 연구에서는 다음과 같은 기능을 갖춘 설계를 제안했습니다. 다중 서스펜션 장치 를 사용하여 모션 및 청소 작업 중 패널에 전달되는 진동을 완화합니다. 또한, 무게를 줄이고, 장애물 통과 기능(예: 구성 요소 사이의 틈새를 연결하는 기능)을 강화하며, 주문형 청소를 위한 지능형 감지(예: 먼지 감지 센서)를 통합하기 위해 구조를 더욱 최적화하는 것도 기술 개발의 방향입니다.
요약하면, 태양광 패널용 레일 청소 로봇은 자동화, 높은 신뢰성, 표준 준수를 통해 대규모 태양광 발전소 유지보수에서 발전 수익을 높이고 장기 운영 비용을 절감하는 데 필수적인 도구로 자리 잡았습니다. 지속적인 기술 발전과 비용 최적화로 인해 적용 범위는 더욱 확대될 것으로 예상됩니다.