หลักการทำงานของ หุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์
หุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์ใช้ระบบกลไก ไฟฟ้า และเซ็นเซอร์ร่วมกัน เพื่อทำความสะอาดแผงโซลาร์เซลล์อย่างมีประสิทธิภาพและปลอดภัย ด้านล่างนี้คือรายละเอียดเกี่ยวกับส่วนประกอบสำคัญที่ประกอบขึ้นเป็นเครื่องทำความสะอาดขั้นสูงเหล่านี้
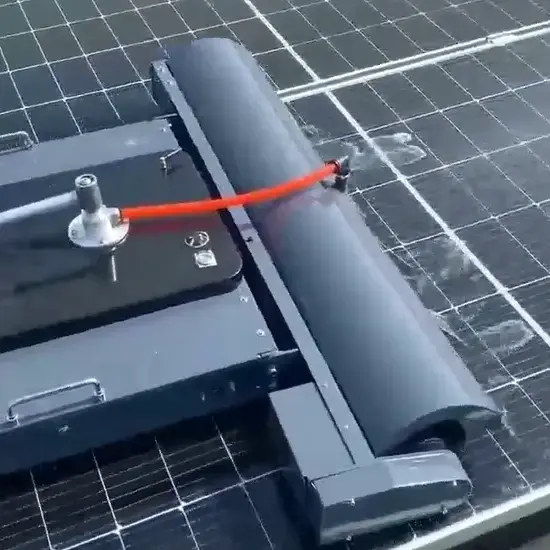
การออกแบบโดยรวมและส่วนประกอบ
โครงสร้างของหุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์ได้รับการออกแบบให้ทำงานได้อย่างราบรื่น โดยทั่วไปประกอบด้วย:
- แชสซี:โครงสร้างที่ยึดส่วนประกอบทั้งหมดเข้าด้วยกัน
- เครื่องมือทำความสะอาด:แปรงและเครื่องพ่นสำหรับขจัดสิ่งสกปรก
- มอเตอร์:ขับเคลื่อนการเคลื่อนไหวของหุ่นยนต์ผ่านพื้นผิวแผงโซล่าเซลล์
- กล่องควบคุม:เป็นที่อยู่ของระบบควบคุมสำหรับจัดการการทำงานของหุ่นยนต์
การเคลื่อนไหวและแรงดึง
หุ่นยนต์มีล้อหรือรางที่ช่วยให้เคลื่อนที่บนพื้นผิวต่างๆ ได้อย่างมีประสิทธิภาพ:
- แรงเสียดทานและแรงดึง:ล้อหรือรางสร้างแรงเสียดทานที่จำเป็นเพื่อให้แผงโซลาร์เซลล์เคลื่อนที่ได้
- การควบคุมมอเตอร์:โปรเซสเซอร์หลักทำหน้าที่ควบคุมมอเตอร์ให้สามารถเคลื่อนที่ไปในทิศทางต่างๆ เพื่อครอบคลุมพื้นที่แผงควบคุมทั้งหมด
กระบวนการทำความสะอาด
วงจรการทำความสะอาดของหุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์ประกอบด้วยหลายขั้นตอน:
- การพ่นเบื้องต้น:หุ่นยนต์เริ่มต้นด้วยการฉีดน้ำหรืออากาศอัดเพื่อคลายสิ่งสกปรกและเศษขยะ
- การแปรงฟัน:แปรงข้างและแปรงลูกกลิ้งจะกวาดทำความสะอาดพื้นผิว แปรงข้างจะปัดเศษฝุ่นเข้าตรงกลาง ขณะที่แปรงลูกกลิ้งจะขัดทำความสะอาดอย่างทั่วถึง

การบูรณาการและการควบคุมเซ็นเซอร์
การบูรณาการเซ็นเซอร์ขั้นสูงช่วยให้หุ่นยนต์ทำงานได้อย่างมีประสิทธิภาพและปลอดภัย:
- เซ็นเซอร์ภาพและโฟโตนิกส์:อุปกรณ์เหล่านี้จะตรวจจับพื้นที่สกปรกและขอบแผงโซลาร์เซลล์เพื่อสร้างเส้นทางการทำความสะอาดที่เหมาะสมที่สุด
- การตรวจจับขอบ:เซ็นเซอร์ช่วยหลีกเลี่ยงการหลุดออกจากขอบแผงโซลาร์เซลล์โดยการสั่งให้หุ่นยนต์เปลี่ยนทิศทางหรือหยุดเมื่อจำเป็น
- การหลีกเลี่ยงอุปสรรค:หุ่นยนต์ซึ่งติดตั้งเซ็นเซอร์วัดระยะเลเซอร์จะนำทางไปรอบๆ สิ่งกีดขวางหรือสิ่งไม่สม่ำเสมอบนแผง และปรับเส้นทางตามความจำเป็น
การจัดการพลังงาน
ประสิทธิภาพการทำงานของหุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์ได้รับการปรับปรุงด้วยเทคนิคการจัดการพลังงานที่มีประสิทธิภาพ:
- แบตเตอรี่แบบชาร์จไฟได้:หุ่นยนต์ส่วนใหญ่ใช้แบตเตอรี่ลิเธียมไออนหรือลิเธียมโพลิเมอร์เพื่อการทำงานที่ยาวนาน
- การชาร์จไฟอัตโนมัติ:หุ่นยนต์หลายตัวสามารถกลับไปยังสถานีชาร์จได้โดยอัตโนมัติเมื่อระดับแบตเตอรี่เหลือน้อย ช่วยให้ให้บริการได้อย่างต่อเนื่อง
เวิร์กโฟลว์การดำเนินงาน
การดำเนินการทั้งหมดสามารถแบ่งย่อยออกเป็นหลายขั้นตอน:
- การเริ่มต้น:หุ่นยนต์จะเริ่มต้นการทำงานของเซ็นเซอร์และระบบควบคุมก่อนที่จะเริ่มงาน
- วงจรการทำความสะอาด:ปฏิบัติตามเส้นทางที่ถูกตั้งโปรแกรมไว้ ฉีดพ่น แปรง และเก็บเศษขยะได้อย่างมีประสิทธิภาพ
- การตรวจสอบขั้นสุดท้าย:หลังจากทำความสะอาดแล้ว หุ่นยนต์จะตรวจสอบความสะอาดโดยใช้เซ็นเซอร์ภาพเพื่อให้แน่ใจว่ามีความละเอียดถี่ถ้วน
- การคืนสินค้าและการเติมเงิน:เมื่อเสร็จแล้วจะกลับสู่สถานีชาร์จเพื่อชาร์จไฟอีกครั้ง
ด้วยการบูรณาการส่วนประกอบและกระบวนการเหล่านี้ หุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์จึงมีบทบาทสำคัญในการรักษาประสิทธิภาพและอายุการใช้งานของระบบแผงโซลาร์เซลล์