の動作原理 太陽光パネル清掃ロボット
ソーラーパネル清掃ロボットは、機械、電気、センサーベースのシステムを組み合わせて、ソーラーパネルを効率的かつ安全に清掃します。以下では、これらの高度な清掃機械を構成する主要コンポーネントについて詳しく説明します。
全体的なデザインとコンポーネント
太陽光パネル清掃ロボットの構造は、シームレスな操作ができるように設計されており、通常は次のものが含まれます。
- シャーシすべてのコンポーネントをまとめるフレーム。
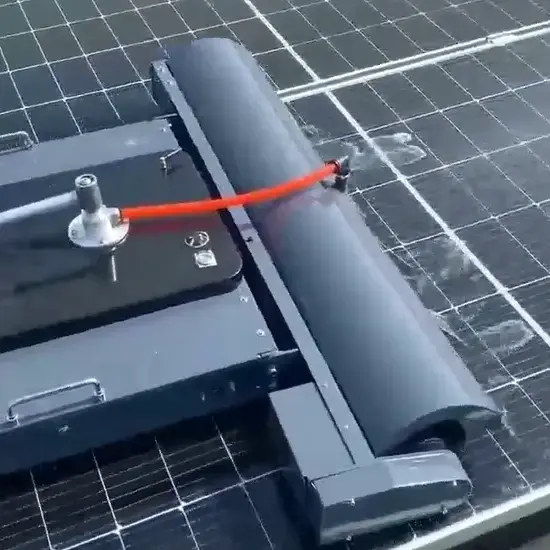
- 掃除用具: 汚れを除去するためのブラシとスプレー。
- モーター: ロボットの動きをソーラーパネルの表面上で制御します。
- コントロールボックス: ロボットの機能を管理するための制御システムを収容します。
動きと牽引
ロボットには、さまざまな表面を効果的に移動できる車輪またはトラックが装備されています。
- 摩擦と牽引車輪またはトラックは、ソーラーパネル上での移動を可能にするために必要な摩擦を生成します。
- モーター制御メインプロセッサがモーターを制御し、パネル領域全体をカバーしながらさまざまな方向への動きを可能にします。
洗浄プロセス
ソーラーパネル清掃ロボットの清掃サイクルには、いくつかのステップが含まれます。
- 初期散布ロボットはまず水または圧縮空気を噴射して汚れやゴミを落とします。
- ブラッシング動作: サイドブラシとローリングブラシが表面をきれいに掃除します。サイドブラシはゴミを中央に導き、ローリングブラシは徹底的にこすります。

センサーの統合と制御
高度なセンサー統合により、ロボットは効率的かつ安全に動作します。
- 視覚および光子センサー: 汚れた部分やソーラーパネルの端を検出し、最適な清掃経路を作成します。
- エッジ検出センサーは、必要に応じてロボットに方向転換や停止を指示することで、ソーラーパネルの端から落ちるのを防ぎます。
- 障害物回避レーザー距離センサーを搭載したロボットは、パネル上の障害物や凹凸を回避し、必要に応じて経路を調整します。
電源管理
太陽光パネル清掃ロボットの運用効率は、効果的な電力管理技術によって向上します。
- 充電式電池ほとんどのロボットは、長時間の動作のためにリチウムイオンまたはリチウムポリマー電池を使用しています。
- 自動充電多くのロボットは、バッテリー残量が少なくなると自動的に充電ステーションに戻り、中断のないサービスを保証します。
運用ワークフロー
全体の操作はいくつかの段階に分けられます。
- 初期化ロボットはタスクを開始する前にセンサーと制御システムを初期化します。
- クリーニングサイクルプログラムされた経路に沿って、効果的にスプレー、ブラッシング、ゴミの収集を行います。
- 最終チェック: 清掃後、ロボットは視覚センサーを使用して清潔度をチェックし、徹底した清掃を確実に行います。
- 返却と再充電: 完了したら充電ステーションに戻って充電します。
これらのコンポーネントとプロセスを統合することにより、太陽光パネル清掃ロボットは太陽光パネル システムの効率と寿命を維持する上で重要な役割を果たします。