เครื่องทำความสะอาดแผงโซล่าเซลล์

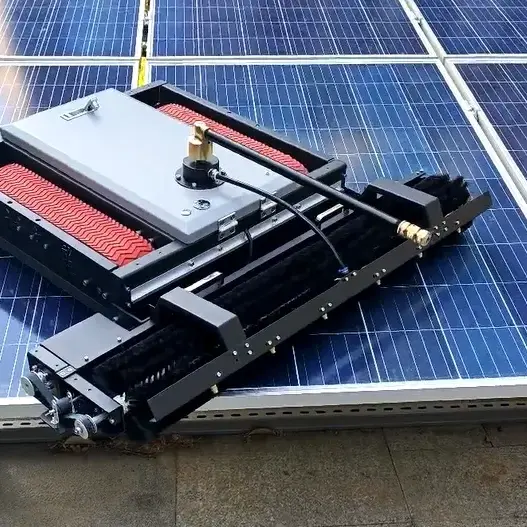
หุ่นยนต์ทำความสะอาดโฟโตโวลตาอิกแบบติดราง
ขั้นตอนการติดตั้ง
การติดตั้งราง: ติดตั้งรางเฉพาะเหนือแผงโซลาร์เซลล์ โดยให้แน่ใจว่ารางขนานกันเพื่อให้หุ่นยนต์เคลื่อนที่ได้อย่างราบรื่น
การวางตำแหน่งหุ่นยนต์: วางหุ่นยนต์บนราง เชื่อมต่อกับแหล่งจ่ายไฟและระบบควบคุมเพื่อการทดสอบเบื้องต้น
การดีบักและการทดสอบ: ใช้ซอฟต์แวร์ควบคุมเพื่อกำหนดเส้นทางและความถี่ในการทำความสะอาด ดำเนินการทดลองเพื่อให้แน่ใจว่าการทำงานปกติโดยไม่มีการสั่นสะเทือนที่ผิดปกติหรือการเคลื่อนไหวออกนอกเส้นทาง
ปัญหาและวิธีแก้ไขทั่วไป
ติดตามข้อผิดพลาดในการติดตั้ง: ข้อผิดพลาดอาจสะสมเกิน 5 มม. หรือข้อผิดพลาดของส่วนประกอบข้างเคียงเกิน 1 มม. ซึ่งส่งผลต่อความแม่นยำของหุ่นยนต์
วิธีแก้ปัญหา: ใช้สถานีทั้งหมดหรือ RTK พร้อมสตริงระบุตำแหน่งเพื่อควบคุมความแม่นยำในการติดตั้งอย่างเคร่งครัด เพื่อให้แน่ใจว่าแทร็กมีความเป็นเส้นตรงและเรียบเสมอกัน
ความเสียหายของการเคลือบสังกะสี: วัสดุรางอาจได้รับความเสียหายที่ชั้นสังกะสีเนื่องจากแรงกระแทกในระหว่างการติดตั้ง ซึ่งส่งผลต่อความทนทานต่อการกัดกร่อนและความสวยงาม
วิธีแก้ไข: ใช้แท่งไม้หรือค้อนยางเพื่อลดแรงกระแทกระหว่างการติดตั้ง จากนั้นทาสีป้องกันการกัดกร่อนและสังกะสีทับบริเวณที่เสียหายเมื่อติดตั้งเสร็จ
การแก้ไขรางที่ไม่มั่นคง: การติดตั้งรางที่ไม่เหมาะสมอาจทำให้เกิดการคลายตัวหรือแยกออกระหว่างการใช้งาน
วิธีแก้ไข: ตรวจสอบให้แน่ใจว่าแรงบิดในการยึดอุปกรณ์เป็นไปตามมาตรฐาน โดยตรวจสอบและเสริมแรงเป็นประจำหากจำเป็น
หุ่นยนต์ทำความสะอาดแบบโฟโตโวลตาอิก
ขั้นตอนการติดตั้ง
การวางตำแหน่งหุ่นยนต์: วางหุ่นยนต์ไว้ที่ปลายด้านหนึ่งของแผงโซลาร์เซลล์ เพื่อให้แน่ใจว่าการเริ่มต้นและการเริ่มดำเนินการทำความสะอาดจะราบรื่น
เชื่อมต่อระบบไฟฟ้าและระบบควบคุม: เชื่อมต่อหุ่นยนต์กับแหล่งจ่ายไฟและเชื่อมต่อผ่านระบบควบคุมแบบไร้สายหรือแบบมีสาย
ตั้งค่าพารามิเตอร์การทำความสะอาด: ใช้ซอฟต์แวร์ควบคุมเพื่อกำหนดเส้นทางการทำความสะอาด ความถี่ และวิธีการ (เช่น การทำความสะอาดแบบไม่ใช้น้ำ)
ปัญหาและวิธีแก้ไขทั่วไป
มุมเอียงวิกฤตขนาดเล็ก: หุ่นยนต์อาจไม่สมดุลเมื่ออยู่บนแผงโซลาร์เซลล์ที่มีมุมลาดชัน
โซลูชัน: ออกแบบระบบดูดสูญญากาศเพื่อให้หุ่นยนต์เคลื่อนที่ผ่านพื้นผิวระหว่าง 0° ถึง 90° ได้อย่างอิสระโดยไม่พลิกคว่ำ
ขนาดใหญ่ที่ต้องใช้การยึดด้วยกลไก: ขนาดใหญ่ของหุ่นยนต์ต้องการอุปกรณ์กลไกเพิ่มเติม ซึ่งทำให้การติดตั้งและการบำรุงรักษามีความซับซ้อน
โซลูชัน: ปรับปรุงการออกแบบหุ่นยนต์เพื่อลดขนาดและเพิ่มความชาญฉลาด ลดการพึ่งพาอุปกรณ์กลไกให้เหลือน้อยที่สุด
ระดับสติปัญญาต่ำ: การขาดการควบคุมอัจฉริยะอาจนำไปสู่การวางแผนเส้นทางที่ไม่มีประสิทธิภาพและการทำความสะอาดที่ไม่เหมาะสม
โซลูชัน: ใช้เทคโนโลยีฟิวชันหลายเซ็นเซอร์เพื่อการวางแผนเส้นทางและการตรวจจับสิ่งกีดขวางที่ดีขึ้น ช่วยเพิ่มระดับความชาญฉลาด
ความสามารถในการข้ามสิ่งกีดขวางไม่เพียงพอ: หุ่นยนต์อาจประสบปัญหาเรื่องความแตกต่างของความสูงหรือช่องว่างระหว่างแผง
โซลูชัน: ออกแบบโครงสร้างรางคู่ที่ทำจากยางที่มีความยืดหยุ่น ช่วยให้หุ่นยนต์สามารถข้ามความสูงที่แตกต่างกันได้สูงสุด 30 มม. และช่องว่าง 100 มม. ช่วยให้ทำความสะอาดได้อย่างต่อเนื่อง
ผลลัพธ์การทำความสะอาดต่ำกว่ามาตรฐาน: การออกแบบแปรงหรือวิธีการทำความสะอาดที่ไม่มีประสิทธิภาพอาจส่งผลให้ประสิทธิภาพในการทำความสะอาดลดลง
วิธีแก้ปัญหา: ใช้ลูกกลิ้งแปรงแบบพันเกลียวเพื่อปรับปรุงประสิทธิภาพโดยปรับการออกแบบให้เหมาะสมโดยใช้การจำลอง CFD เพื่อให้ได้ผลลัพธ์ที่ดีที่สุด
แรงรวมศูนย์บนแผงโซลาร์เซลล์: การใช้แรงมากเกินไปในบางพื้นที่ระหว่างการทำความสะอาดอาจทำให้เกิดการเสียรูปหรือเสียหายได้
โซลูชัน: ออกแบบหุ่นยนต์ที่มีองค์ประกอบรับน้ำหนักตรงกลางเพื่อลดแรงโดยตรงบนขอบแผง ใช้โครงโลหะผสมอลูมิเนียมเพื่อลดแรงกดโดยตรงบนแผง
บทสรุป
ทั้งคู่ ติดตั้งบนราง เครื่องทำความสะอาดแผงโซล่าเซลล์ และ หุ่นยนต์ทำความสะอาดแผงโซลาร์เซลล์แบบคลานเลอร์ ต้องเผชิญกับความท้าทายมากมายทั้งการติดตั้งและการใช้งาน ด้วยการปฏิบัติตามมาตรฐานการติดตั้งที่เข้มงวด การออกแบบโครงสร้างที่สมเหตุสมผล และการใช้เทคโนโลยีการควบคุมขั้นสูง ความท้าทายเหล่านี้จึงสามารถจัดการได้อย่างมีประสิทธิภาพ วิธีนี้ช่วยให้หุ่นยนต์ทำความสะอาดพลังงานแสงอาทิตย์ทำงานได้อย่างมีประสิทธิภาพและปลอดภัย ช่วยเพิ่มประสิทธิภาพการผลิตพลังงานและระดับการบำรุงรักษาสถานีพลังงานแสงอาทิตย์