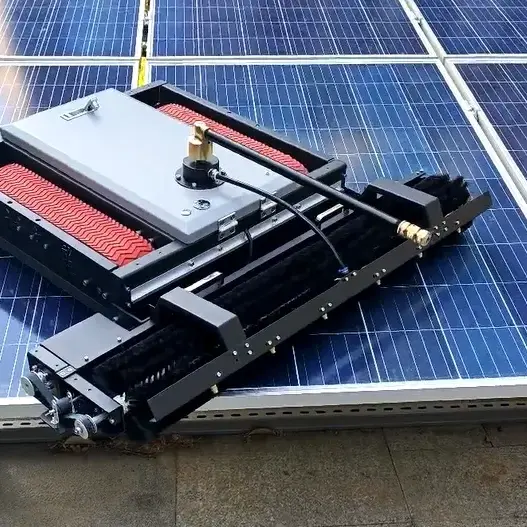
Solar Panel Cleaning machine

Track-Mounted Photovoltaic Cleaning Robot
Installation Steps
Track Installation: Install the specialized track above the photovoltaic panel arrays, ensuring the track is parallel to allow smooth robot movement.
Robot Placement: Position the robot on the track, connect it to the power supply and control system for initial testing.
Debugging and Testing: Use the control software to set cleaning paths and frequency, conduct trial runs to ensure normal operation without abnormal vibrations or off-track movements.
Common Issues & Solutions
Track Installation Errors: Errors may accumulate beyond 5 mm or neighboring component errors over 1 mm, affecting robot accuracy.
Solution: Use a total station or RTK with positioning strings to strictly control installation precision, ensuring track linearity and flatness.
Zinc Coating Damage: Track material may suffer zinc layer damage due to impacts during installation, affecting corrosion resistance and aesthetics.
Solution: Use a wood block or rubber hammer to cushion impacts during installation; recoat damaged areas with anti-corrosion and zinc paint when done.
Unstable Track Fixing: Inadequately fixed tracks may lead to loosening or detachment during operation.
Solution: Ensure the fastening torque of fixtures meets standards, with regular inspections and reinforcements if necessary.
Crawler Photovoltaic Cleaning Robot
Installation Steps
Robot Placement: Place the robot at one end of the photovoltaic panel, ensuring smooth startup and commencement of cleaning operations.
Connect Power & Control Systems: Link the robot to the power supply and connect via wireless or wired control systems.
Set Cleaning Parameters: Use control software to set cleaning paths, frequency, and methods (such as waterless cleaning).
Common Issues & Solutions
Small Critical Tilt Angle: The robot may become unbalanced on steep-angled photovoltaic panels.
Solution: Design a vacuum suction system to enable the robot to freely traverse surfaces between 0° to 90° without tipping.
Large Size Requiring Mechanical Fixation: The robot’s large size demands additional mechanical fixtures, complicating installation and maintenance.
Solution: Optimize robot design to reduce size and enhance intelligence, minimizing reliance on mechanical fixtures.
Low Intelligence Level: Lack of intelligent control can lead to inefficient path planning and suboptimal cleaning.
Solution: Employ multi-sensor fusion technology for better path planning and obstacle detection, increasing intelligence levels.
Insufficient Obstacle-Crossing Capability: The robot may struggle with height differences or gaps between panels.
Solution: Design flexible rubber dual-track structures, enabling the robot to cross height differences up to 30 mm and gaps of 100 mm, ensuring uninterrupted cleaning.
Subpar Cleaning Results: Ineffective brush design or cleaning methods could result in poor cleaning performance.
Solution: Use spiral-wound brush rollers to improve efficiency, optimizing design using CFD simulation for best results.
Concentrated Force on Photovoltaic Panels: Excessive force on certain areas during cleaning may cause deformation or damage.
Solution: Design robots with central load-bearing elements to minimize direct force on panel edges; use aluminum alloy frames to mitigate direct pressure on panels.
Abschluss
Both track-mounted Solar Panel cleaning machine Und crawler Solar Panel cleaning robots face a variety of challenges during installation and operation. By adhering to strict installation standards, employing rational structural design, and utilizing advanced control technologies, these challenges can be effectively addressed. This ensures the efficient and safe operation of photovoltaic cleaning robots, enhancing the power generation efficiency and maintenance level of photovoltaic stations.